|
peterng (at) mit (dot) edu Peter (Phat) Nguyen is a researcher at MIT CSAIL, advised by Prof. Daniela Rus. Peter completed his Bachelor's degree in Computer Science with a minor in Mathematics at the University of Massachusetts Amherst, where he was a researcher at the Computer Vision Lab, advised by Prof. Erik Learned-Miller. My research interest lies at the intersection of computer vision, machine learning, and robotics. My goal is to bridge the gap between high-level cognition and low-level planning and control. Google Scholar / CV / LinkedIn / Github / X |
|
|
My area of research interest is in computer vision, machine learning, and robotics. |
|
project page / arXiv / bibtex |
@inproceedings{
nguyen2025regen,
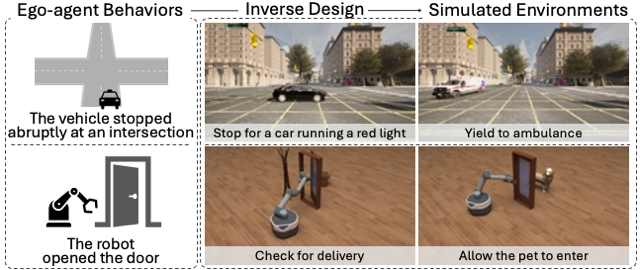
title={ReGen: Generative Robot Simulation via Inverse Design},
author={Phat Nguyen, Tsun-Hsuan Wang, Zhang-Wei Hong, Erfan Aasi, Andrew Silva, Guy Rosman,
Sertac Karaman, Daniela Rus},
booktitle={The Thirteenth International Conference on Learning Representations},
year={2025},
url={https://openreview.net/forum?id=EbCUbPZjM1}
}
|
|
|
project page / arXiv / bibtex |
@INPROCEEDINGS{10801754,
author={Nguyen, Phat and Wang, Tsun-Hsuan and Hong, Zhang-Wei and Karaman, Sertac
and Rus, Daniela},
booktitle={2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
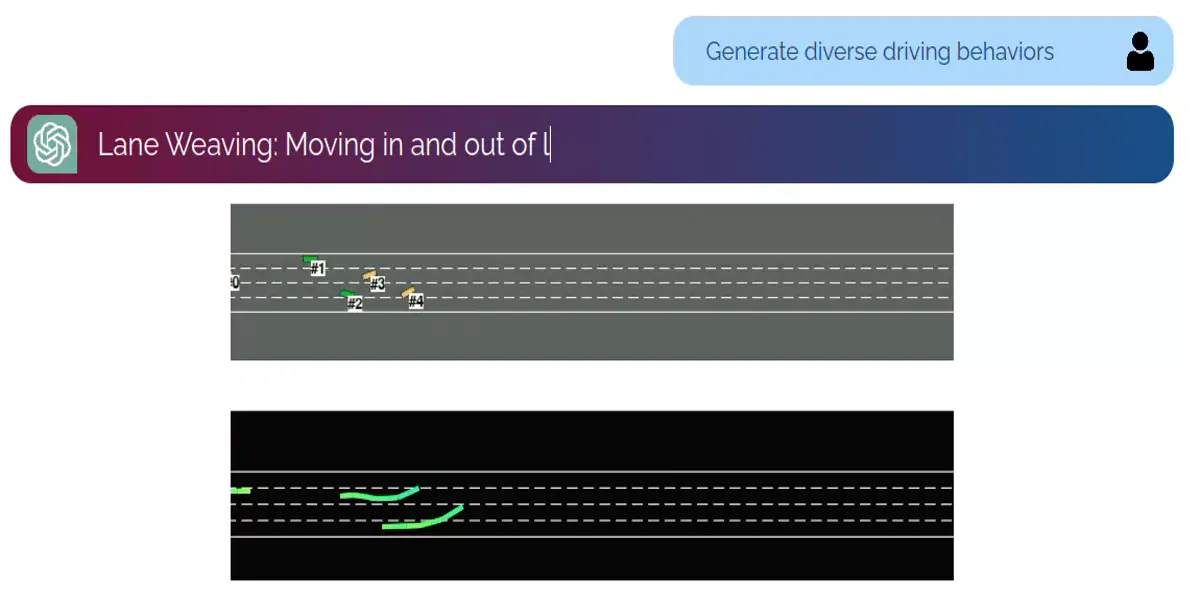
title={Text-to-Drive: Diverse Driving Behavior Synthesis via Large Language Models},
year={2024},
volume={},
number={},
pages={10495-10502},
keywords={Training;Large language models;Natural languages;Cognition;Trajectory;Driver behavior;
Intelligent robots;Autonomous vehicles},
doi={10.1109/IROS58592.2024.10801754}
}
|
|
|
project page / arXiv / bibtex |
@article{Delattre2023RobustRotation,
author = {Fabien Delattre, David Dirnfeld, Phat Nguyen, Stephen Scarano, Michael J. Jones,
Pedro Miraldo, Erik Learned-Miller},
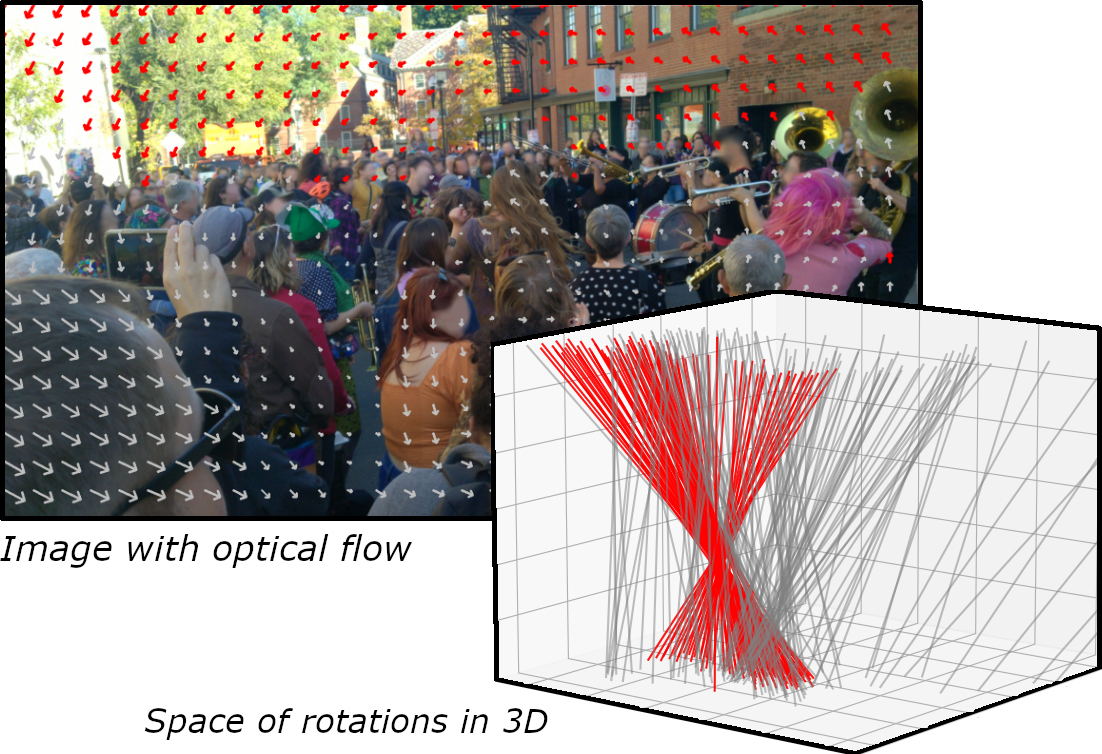
title = {Robust frame-to-frame camera rotation estimation in crowded scenes},
journal = {2023 IEEE/CVF International Conference on Computer Vision (ICCV)},
year = {2023}
}
|
|
|
|
| Sept. 2023, |
TA for CS326: Web Programming, UMass |
| May 2023, |
TA for CS240: Reasoning Under Uncertainty, UMass |
| Jan. 2023, |
TA for CS389: Machine Learning, UMass (Received distinguished TA award) |
|
Previously, I co-founded Stella Agritech to create technologies that enhance the efficiency of agriculture. I also led ISHCMC's sustainability program with Tanya Meftah, which was nominated by the European Chambers of Commerce for the Best Sustainable Business Initiative in Vietnam in 2019. I was also part of the UMass Rocket Team between 2021-2022. |
 |
UMass Aerospace and Rocket Team, NASA SLI 2022, Payload Software Engineer
Building the onboard flight inertial reference system (IRS) to continuously compute the launch vehicle's dead reckoning position in a GPS-denied environment with a 75 meter (250 ft) resolution |
|
|
Some inspiration from Jon Barron. |